



En collaboration avec des experts de l'EPFL et de l'ETH Zurich, une équipe de l'Empa effectue des recherches sur la prochaine génération de gants VR, avec lesquels les mondes virtuels deviennent tangibles dans le métavers. Le gant doit être taillé sur mesure pour l'utilisateur et pouvoir être produit en grande partie automatiquement - par un procédé d'impression 3D.
Dorina Opris, directrice du groupe de recherche Functional Polymeric Materials et Patrick Danner, chercheur à l'Empa, font partie, avec leurs recherches sur les polymères électroactifs, d'un grand projet appelé "Manufhaptics". L'objectif de ce projet de quatre ans, dirigé par Herbert Shea du Soft Transducers Lab de l'EPFL, est de créer un gant qui rende les mondes virtuels tangibles. Point crucial : tous les composants du gant, qui exercent différentes forces sur la surface de la main, doivent pouvoir être fabriqués par impression 3D. Il s'agit donc ici d'explorer de nouveaux matériaux dont la méthode de production est pensée dès le départ.
Trois types d'actionneurs

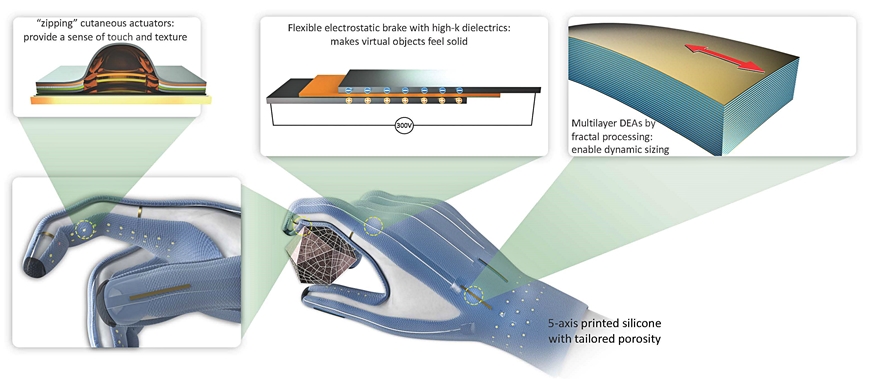
Pour que les surfaces virtuelles soient réelles au toucher et que les objets soient tangibles à la bonne taille, les équipes de recherche de l'EPFL, de l'ETH Zurich et de l'Empa veulent intégrer trois types d'actionneurs différents dans le gant : Sur la face inférieure des doigts, des picots peuvent se développer et reproduire une certaine texture de surface. Des freins électrostatiques sont montés au niveau des articulations des doigts, ce qui rigidifie le gant et bloque les articulations. Cela simule des objets plus grands et solides qui offrent une résistance lorsqu'on les touche. Le troisième type d'actionneurs qui complètent l'expérience virtuelle s'appelle DEA, abréviation de Dielectric elastic actuators. Ces DEA sont placés sur le dos de la main ; ils resserrent la peau extérieure du gant de manière à ce qu'il soit parfaitement ajusté à tous les endroits. Pendant l'expérience VR, ils peuvent en outre exercer une pression sur la surface de la main. Les DEA sont le projet partiel de l'Empa.
Des "muscles" artificiels issus de l'impression 3D
Dorina Opris, la directrice du groupe de recherche, a accumulé des années d'expérience avec de tels polymères électroactifs. "Ces polymères élastiques réagissent aux champs électriques et se contractent comme un muscle", explique la chercheuse. "Mais ils peuvent aussi servir de capteur, absorber une force extérieure et générer une impulsion électrique à partir de celle-ci. Nous envisageons également de les utiliser pour produire de l'énergie localement : Le mouvement peut ainsi générer de l'électricité partout".
Le projet Manufhaptics pose de nouveaux défis à la chercheuse et à son collègue Patrick Danner. "Jusqu'à présent, nous avons fabriqué nos polymères à l'aide de solvants par le biais d'une synthèse chimique", explique Opris. Désormais, tout doit fonctionner sans solvant : Il est prévu de superposer jusqu'à 1000 fines couches issues de l'imprimante 3D, en alternant toujours le polymère électroactif et une couche conductrice de courant.
"Il faut éviter les solvants dans une telle méthode de production", explique Opris. Et Patrick Danner d'expliquer la difficulté suivante : les deux différentes encres nécessaires doivent avoir la consistance exacte pour s'écouler de la buse de l'imprimante 3D. "Notre partenaire de projet Jan Vermant de l'ETH Zurich souhaite quelque chose avec des propriétés similaires à celles d'une crème pour les mains. Elle doit sortir facilement de l'imprimante, puis rester indéformable sur son support". Et ensuite, cette structure de couche crémeuse doit encore se réticuler pour former le polymère adéquat.
Après une longue série d'essais, Danner a trouvé une formulation prometteuse - une crème à la fois suffisamment liquide et indéformable, à partir de laquelle des polymères électroactifs peuvent être créés en une seule étape. Son collègue Tazio Pleji de l'EPF de Zurich, un collaborateur de l'équipe de recherche de Jan Vermant, a réussi à transformer le matériau en plusieurs couches dans son imprimante 3D - toujours en alternant polymère et matériau d'électrode. Il n'y a pas encore 1000 couches, mais seulement une dizaine, et le muscle artificiel issu de l'imprimante 3D ne fonctionne pas encore de manière satisfaisante.
La concurrence est à Harvard
Mais Opris et Danner sont confiants de réussir cette tâche en collaboration avec les spécialistes de l'impression de l'ETH Zurich - peut-être la première équipe de chercheurs au monde. Les seuls concurrents scientifiques dans ce domaine siègent à l'université de Harvard dans le Massachusetts.
Source : Empa



